登录
注册
首页
本社概况
本社简介
组织机构
现任领导
企业资质
企业荣誉
新闻中心
最新动态
通知公告
党建园地
党建之家
理论学习
图书中心
图书库
图书推荐
图书资料
书评
联系我们
我要出书
版权合作
数字出版
我要购书
二维码资源
二维码资源库
读者反馈
联系我们
我要出书
>
版权合作
>
数字出版
>
我要购书
>
二维码资源
>
二维码资源库
>
读者反馈
>
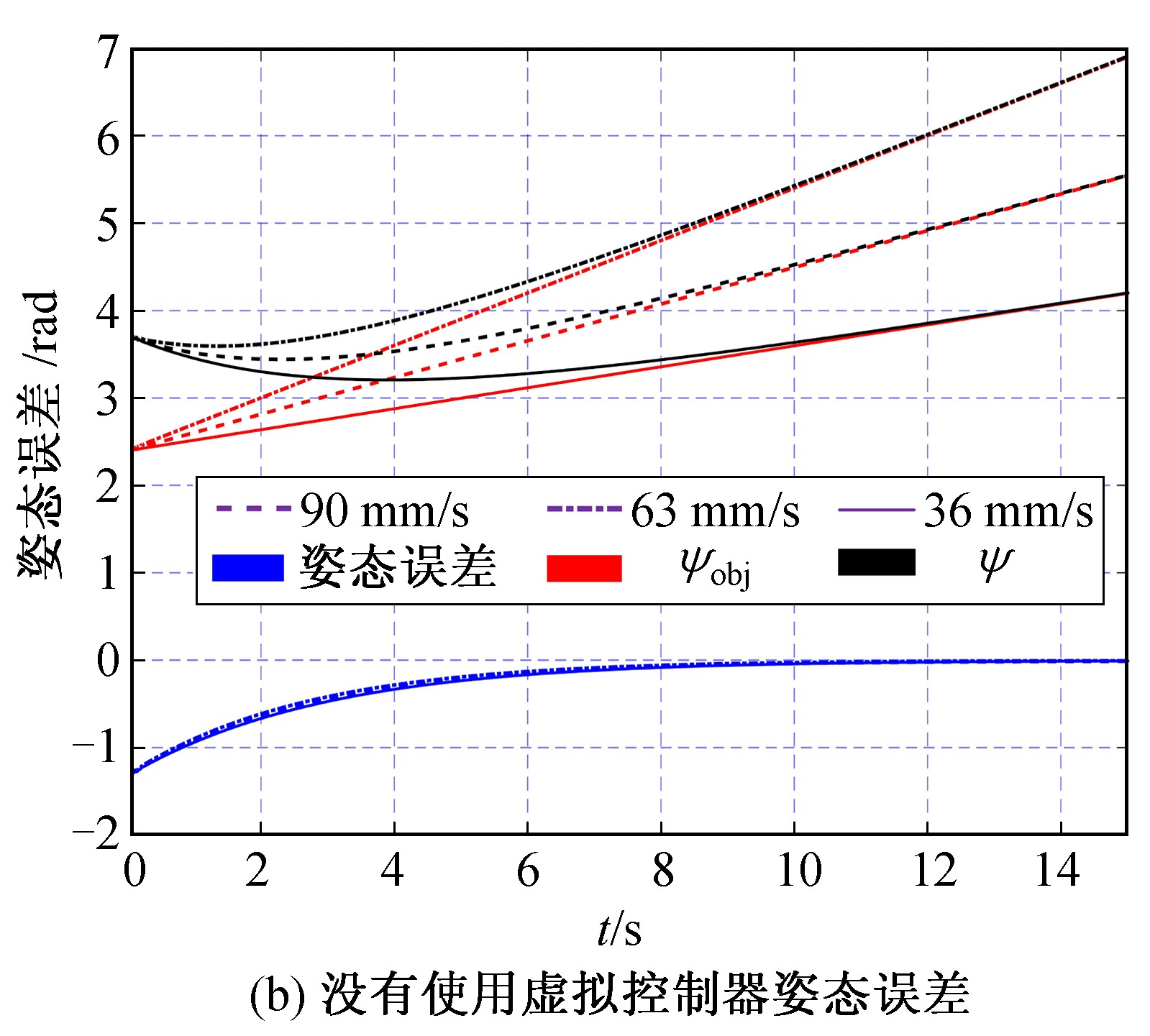
《环境约束下冗余度机械臂运动规划技术》 图5.11(b)
发布者:刘威
发布时间:2024-10-29
浏览次数:
93