局部自由度、虚约束及复合铰链概念
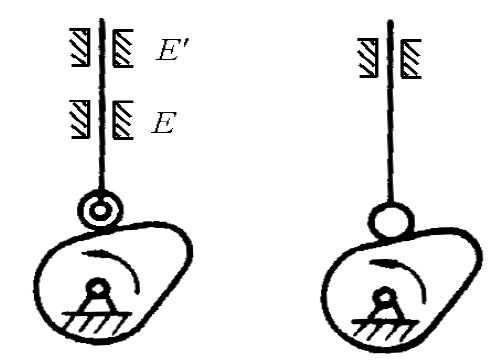
1.什么是局部自由度?
不影响机构整体运动的自由度,称为局部自由度。在计算机构自由度时,局部自由度应当舍弃不计,如下图所示。
2.什么是虚约束?
在机构中,有些约束所起的限制作用可能是重复的,这种不起独立限制作用的约束称为虚约束。应在计算结果中加上虚约束数,或先将产生虚约束的构件和运动副去掉,然后再进行计算,如下图所示。
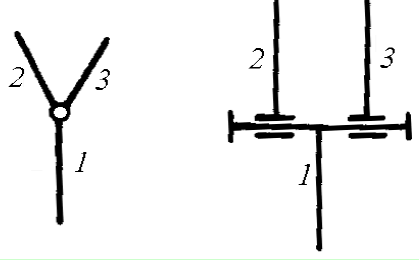
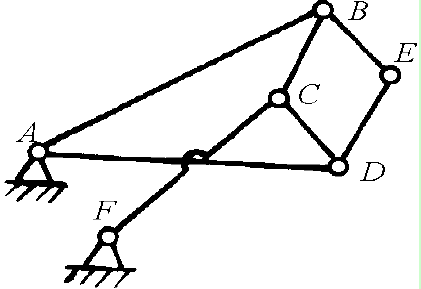
3.什么是复合铰链?
复合铰链由两个以上构件在同一处构成的重合转动副称为复合铰链。由m个构件构成的复合铰链应当包含(m-1)个转动副。

局部自由度、虚约束及复合铰链概念
1.什么是局部自由度?
不影响机构整体运动的自由度,称为局部自由度。在计算机构自由度时,局部自由度应当舍弃不计,如下图所示。
2.什么是虚约束?
在机构中,有些约束所起的限制作用可能是重复的,这种不起独立限制作用的约束称为虚约束。应在计算结果中加上虚约束数,或先将产生虚约束的构件和运动副去掉,然后再进行计算,如下图所示。
3.什么是复合铰链?
复合铰链由两个以上构件在同一处构成的重合转动副称为复合铰链。由m个构件构成的复合铰链应当包含(m-1)个转动副。


