
来源:哈尔滨工业大学公众号
形似大象象鼻或是
章鱼触手的软机械手
是软体机器人领域的重要分支
科学家们希望能够开发出
像手臂一样灵巧的软机械手
并在人机交互过程中
始终保持人类安全
因此
软机械手领域需要
更有前景的解决方案
其中包括更加高效的结构设计
和精密运动控制器
针对这一问题
机器人技术与系统
全国重点实验室副主任
哈工大机电学院朱延河教授团队
研制出新型TSM软机械手
实现了优异的可变刚度范围
和精密运动控制
相关成果发表在机器人领域
国际顶级期刊《IEEE机器人学汇刊》上
近日,朱延河教授团队成功研制出新型TSM软机械手,包括一种由复合肌腱和气动肌肉混合驱动的锥形软机械手设计及精密运动控制器。
机器人的驱动结构由首次提出的鲍登管和电缆肌腱组成的复合肌腱和气驱锥形波纹管紧凑集成设计,实现了优异的可变刚度范围。
团队提出的基于深度学习方法与闭环迭代反馈控制器结合的控制策略,实现了软机械手的精密运动控制。
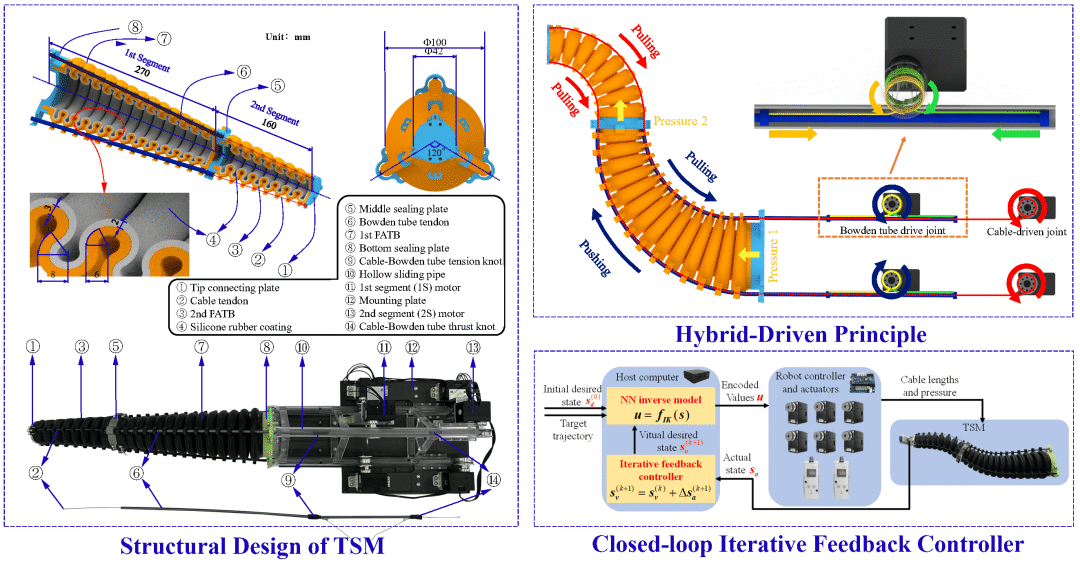
结合复合肌腱和气动肌肉混合驱动的新型软机械手设计和控制方案简介
实验结果显示出毫米级控制精度和对外部扰动的自适应性,新型TSM软机械手在遥操作控制下成功进行了越障抓取操作,验证了其在人手干扰下沿平面跟踪轨迹的任务能力,为软机械手设计与控制提供了新的解决途径。
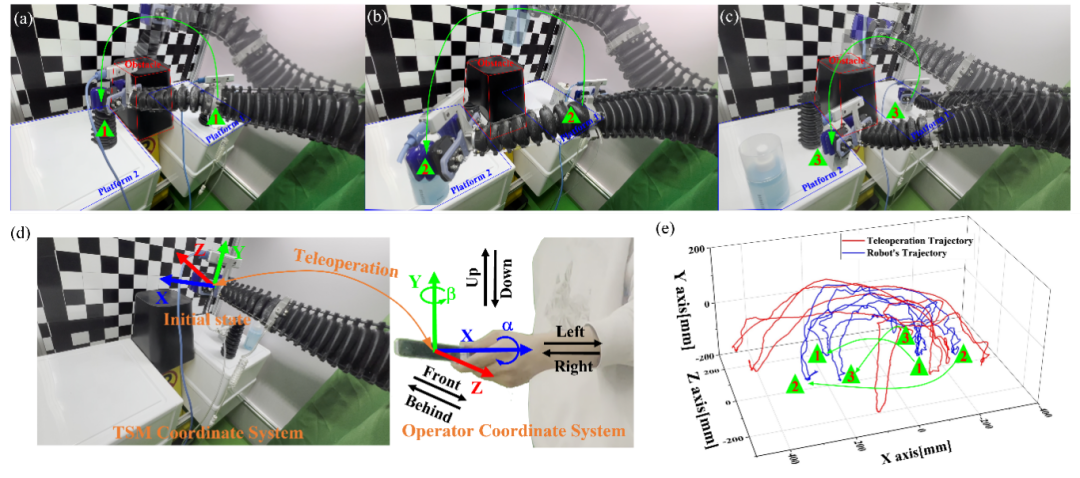
锥形软机械手遥操作抓取控制验证
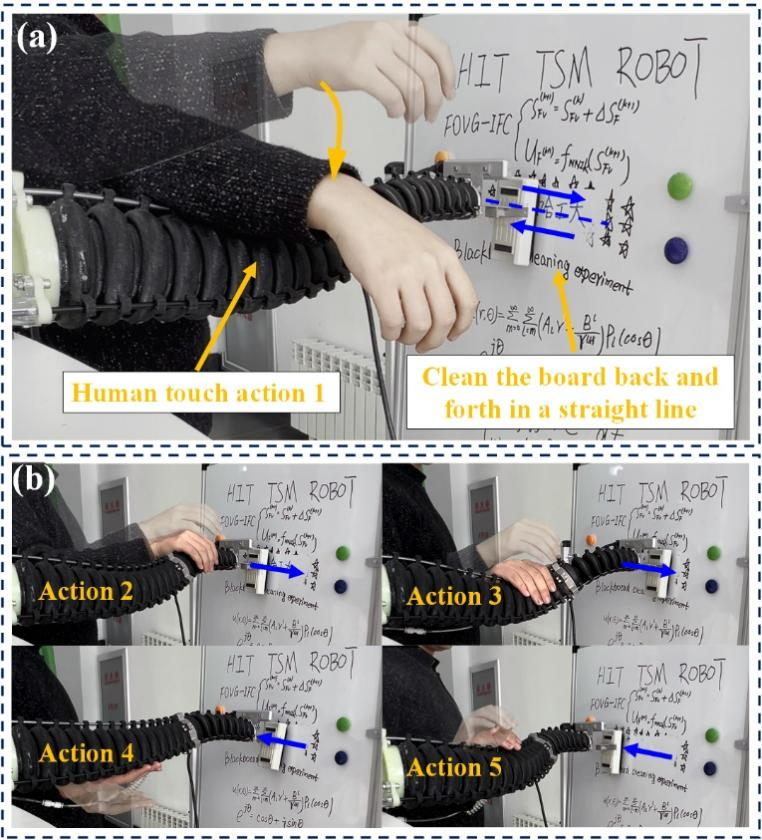
人手接触下白板擦除实验的扰动自适应
与人机安全性验证
这一研究成果以《扰动自适应锥形软机械手配置任务性能增强的精密运动控制器》(Disturbance-Adaptive Tapered Soft Manipulator with Precise Motion Controller for Enhanced Task Performance)为题发表在机器人领域国际顶级期刊《IEEE机器人学汇刊》(IEEE Transactions on Robotics)上,将助力提高软机械手的精密运动控制和扰动自适应能力,未来有望应用于健康养老领域。
哈工大为论文第一单位,论文第一作者为机器人技术与系统全国重点实验室博士生李相龙,新加坡国立大学博士生熊泉为论文共同第一作者,通讯作者为机器人技术与系统全国重点实验室副主任朱延河教授。共同作者包括哈工大机器人研究所所长赵杰教授,上海交通大学自动化系王贺升教授,机器人技术与系统全国重点实验室郑天骄副研究员,广东省季华实验室隋东宝博士,哈工大机电学院博士生张清华、李洪武和硕士生王子齐。
该研究获得国家重点研发计划等项目资助。


